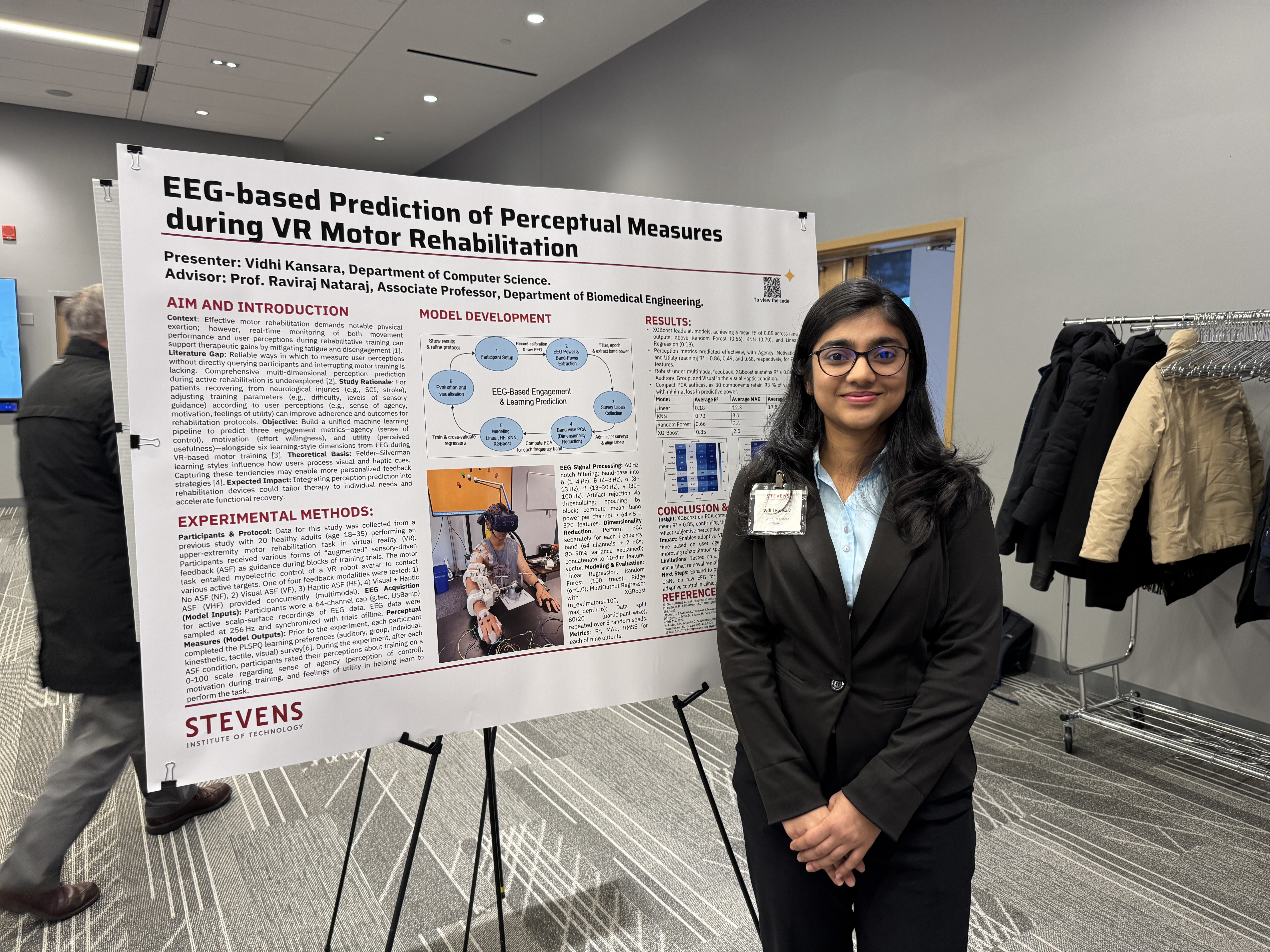
SIAI Fellows Poster Presentation
On November 12th, 2025, Masters student Vidhi Kansara presented her work title "EEG-based Prediction of Perceptual Measures during VR Motor Rehabilitation" at the SIAI Fellows Poster Presentation Event at Stevens Institute of Technology.
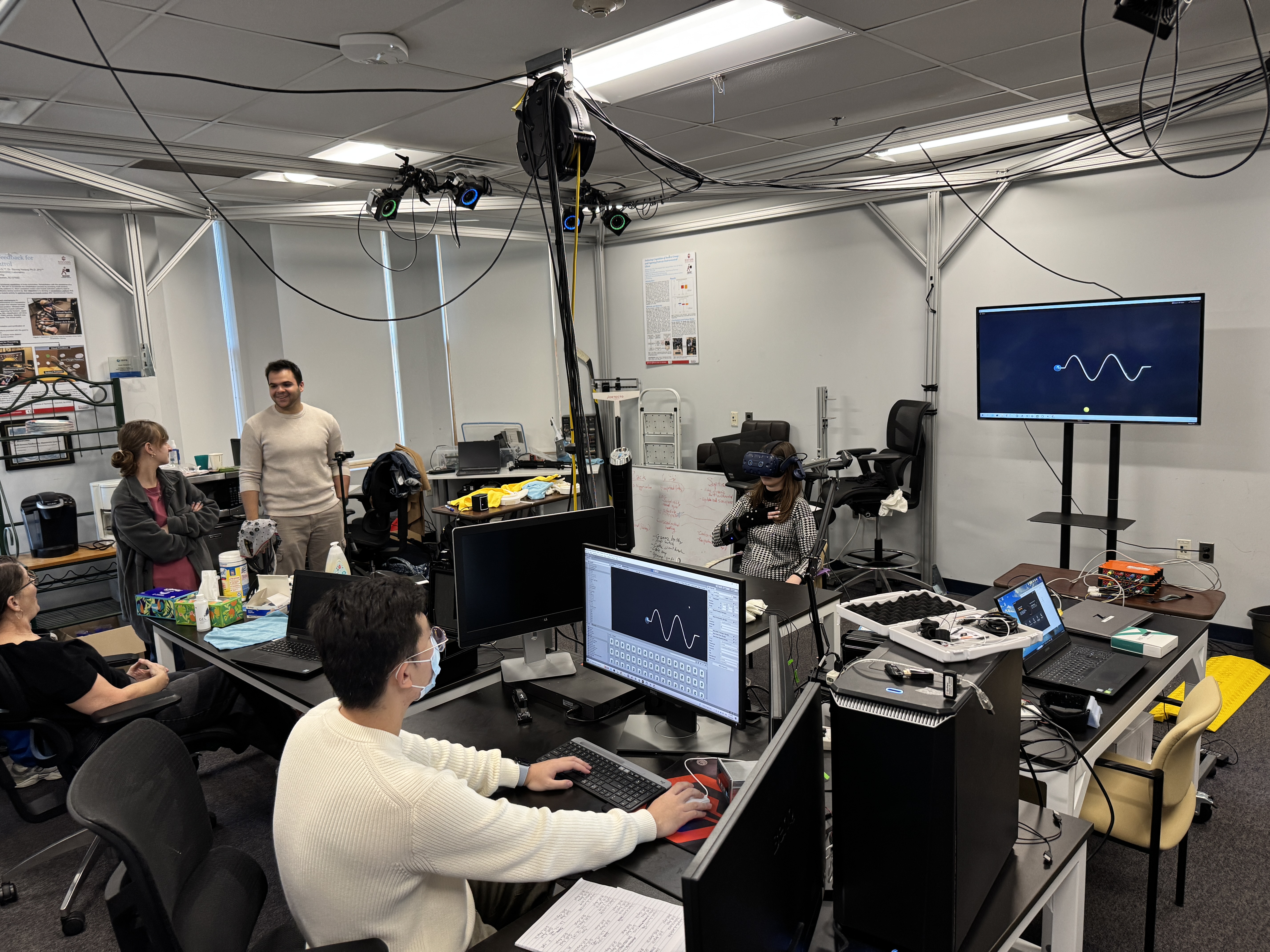
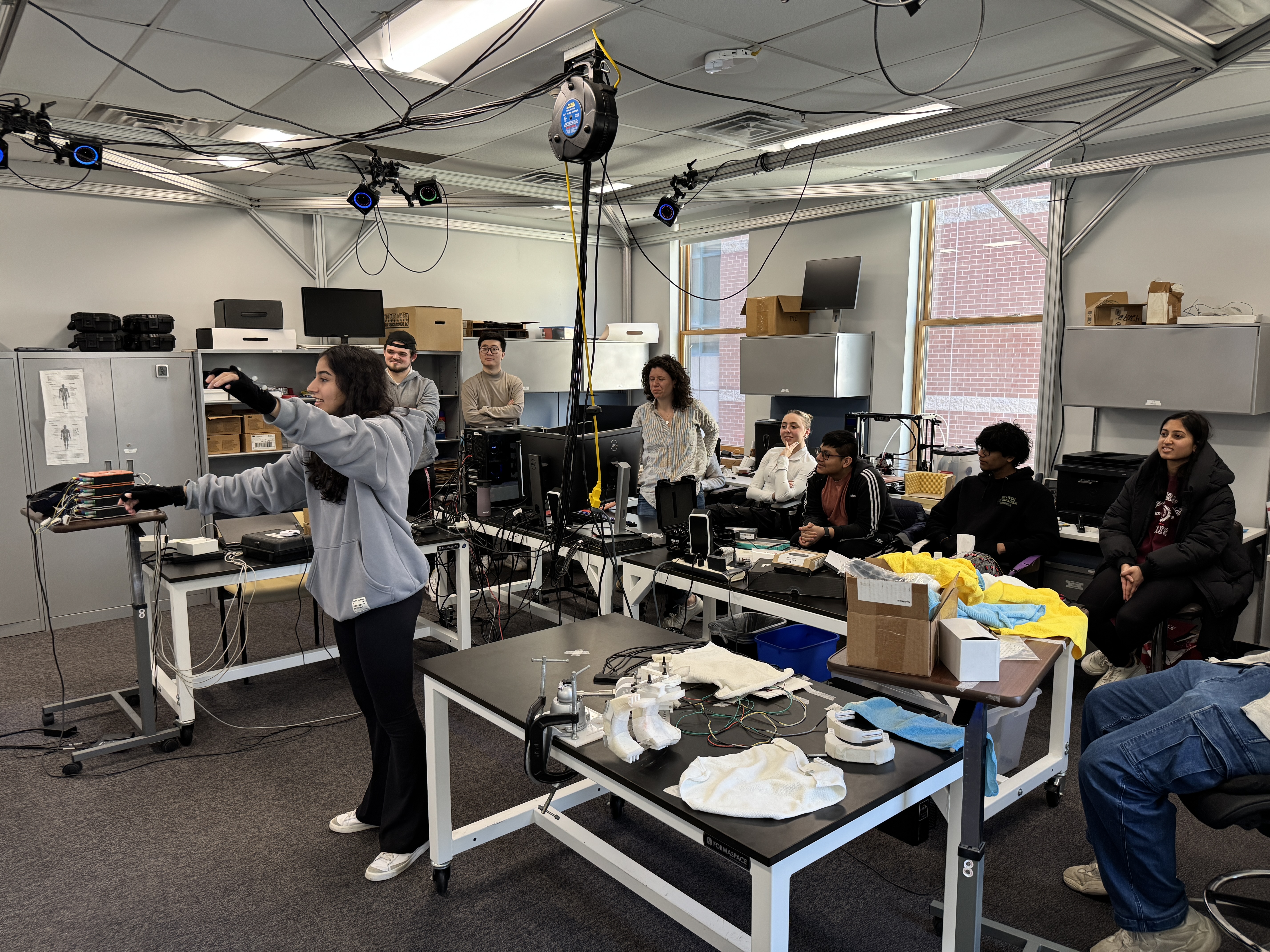
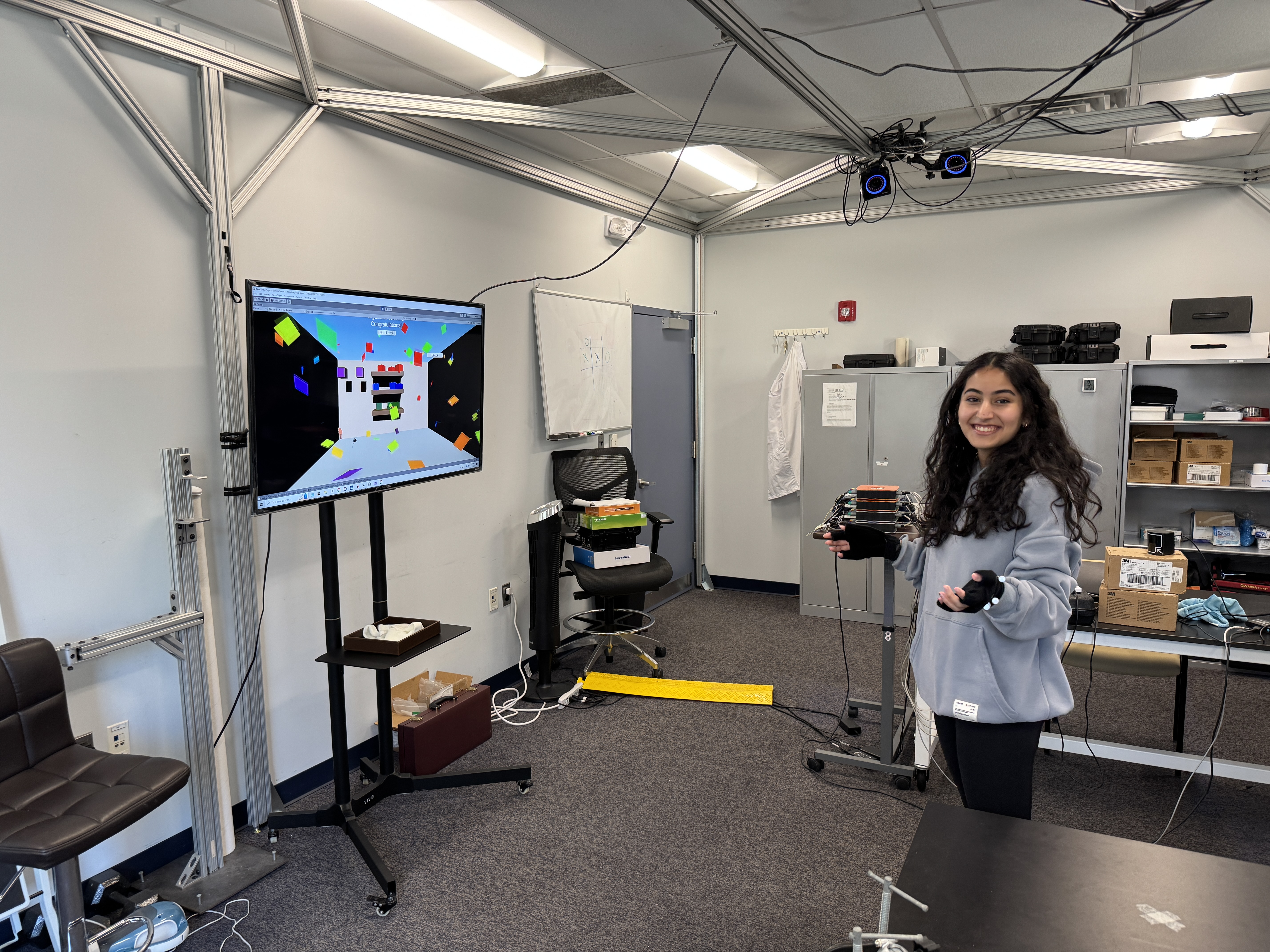
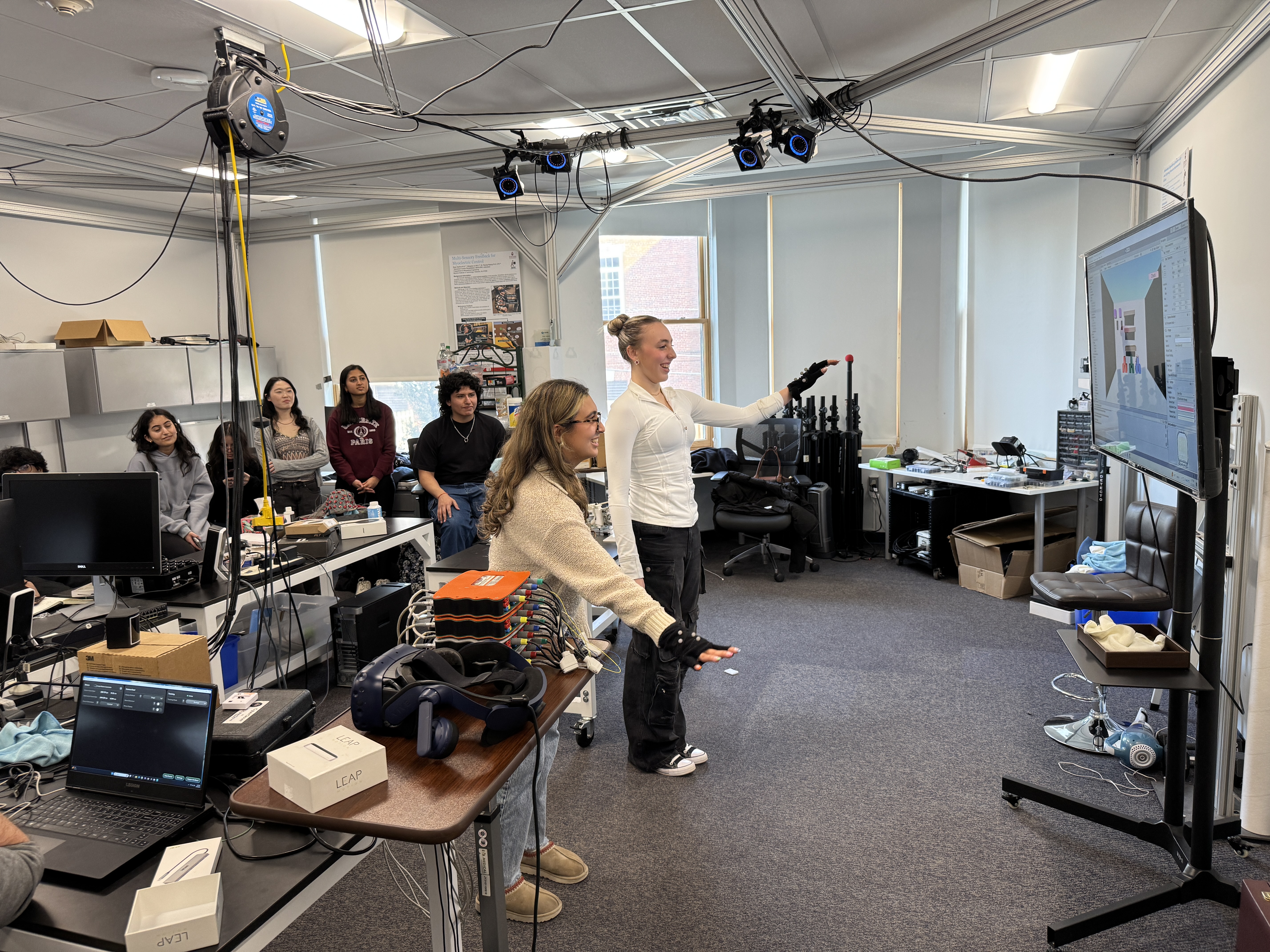
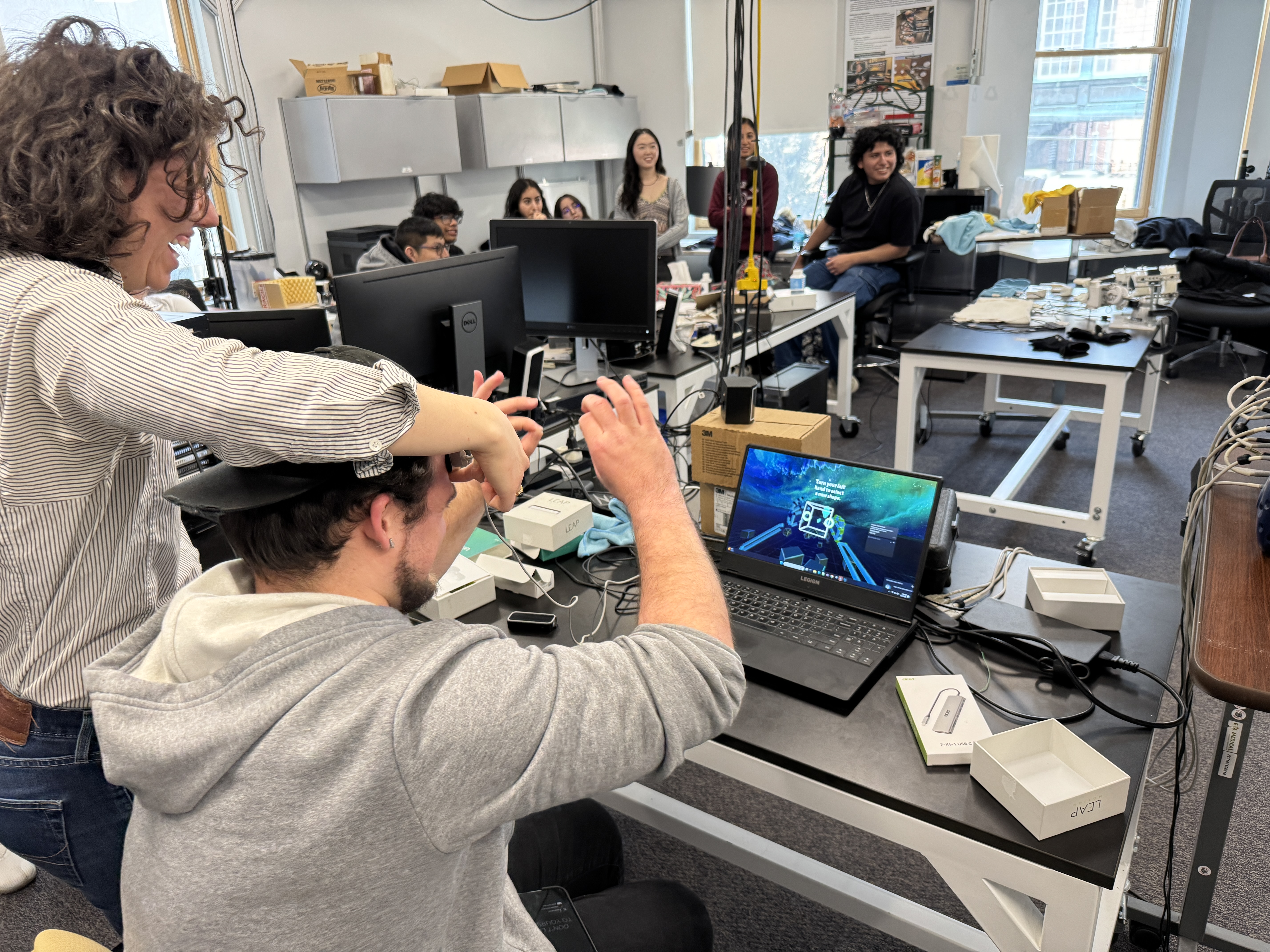
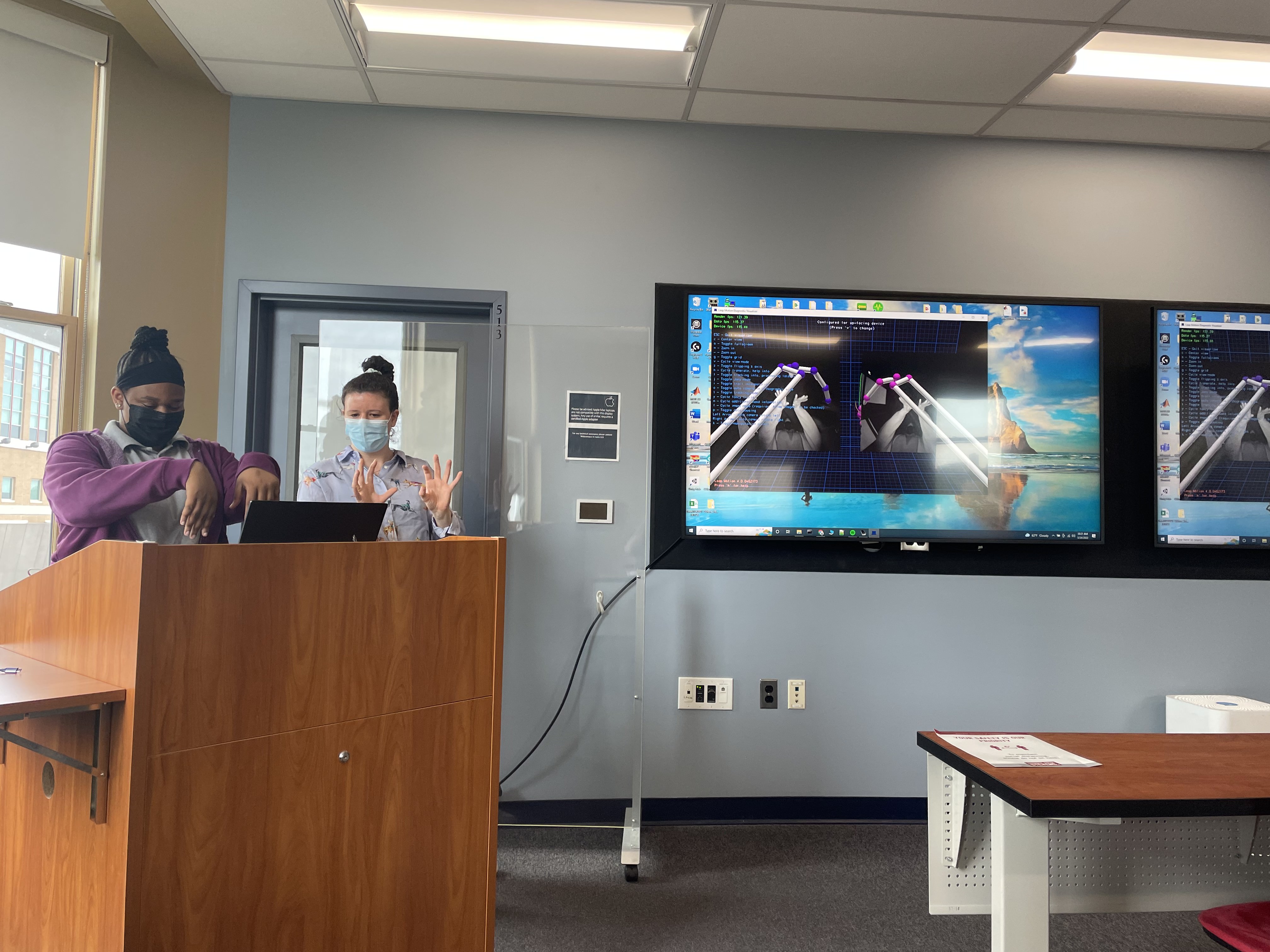
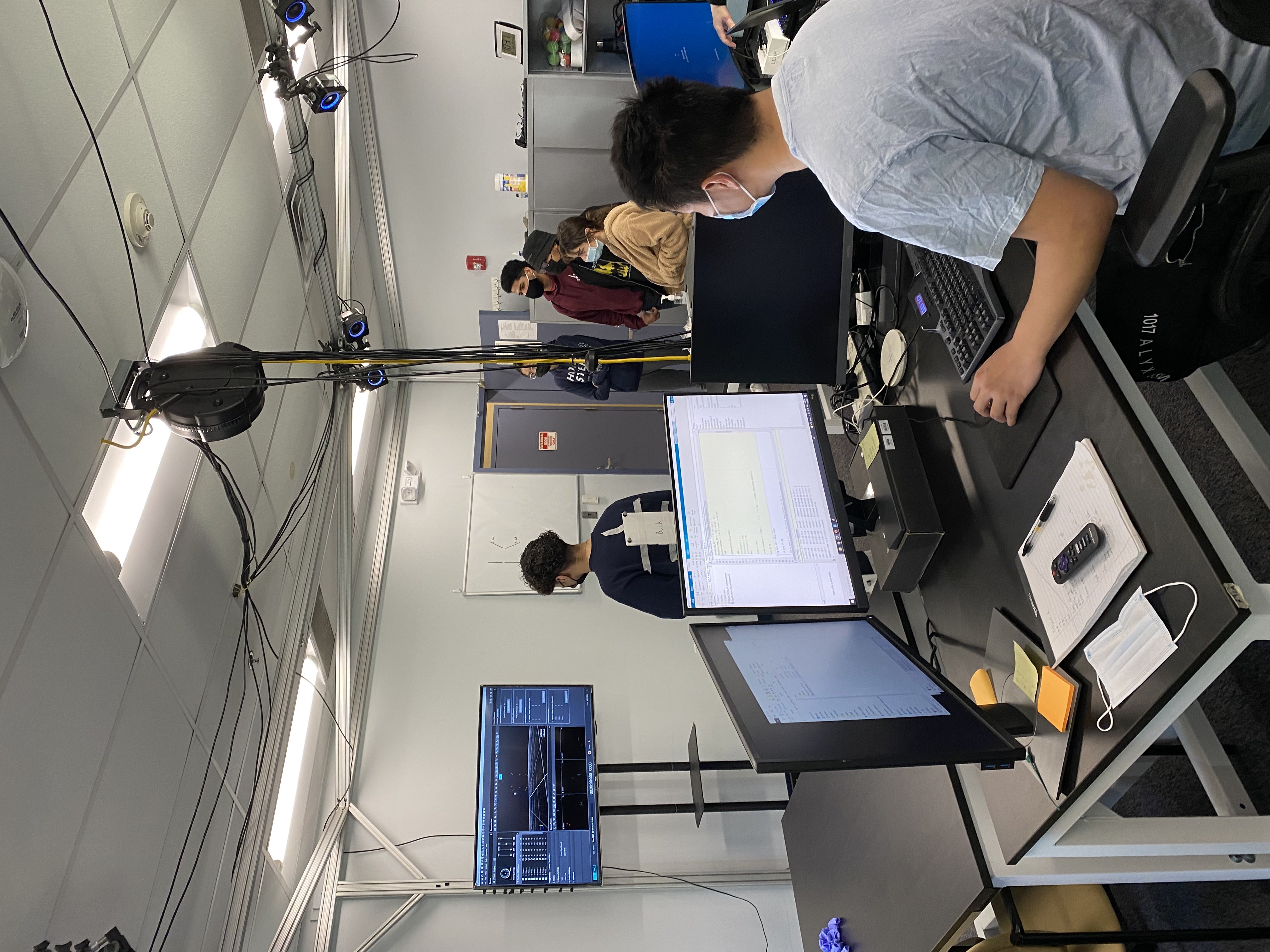
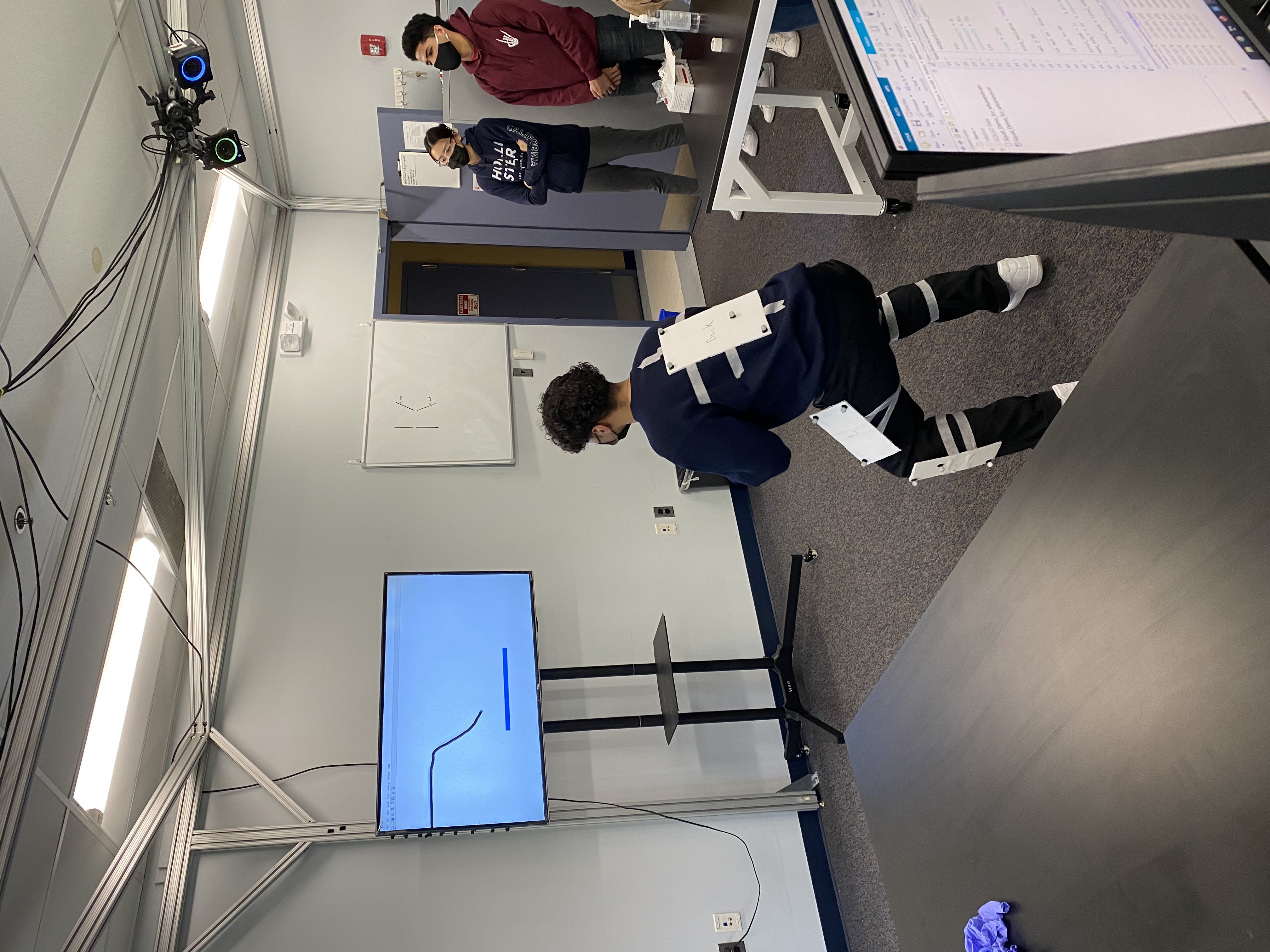
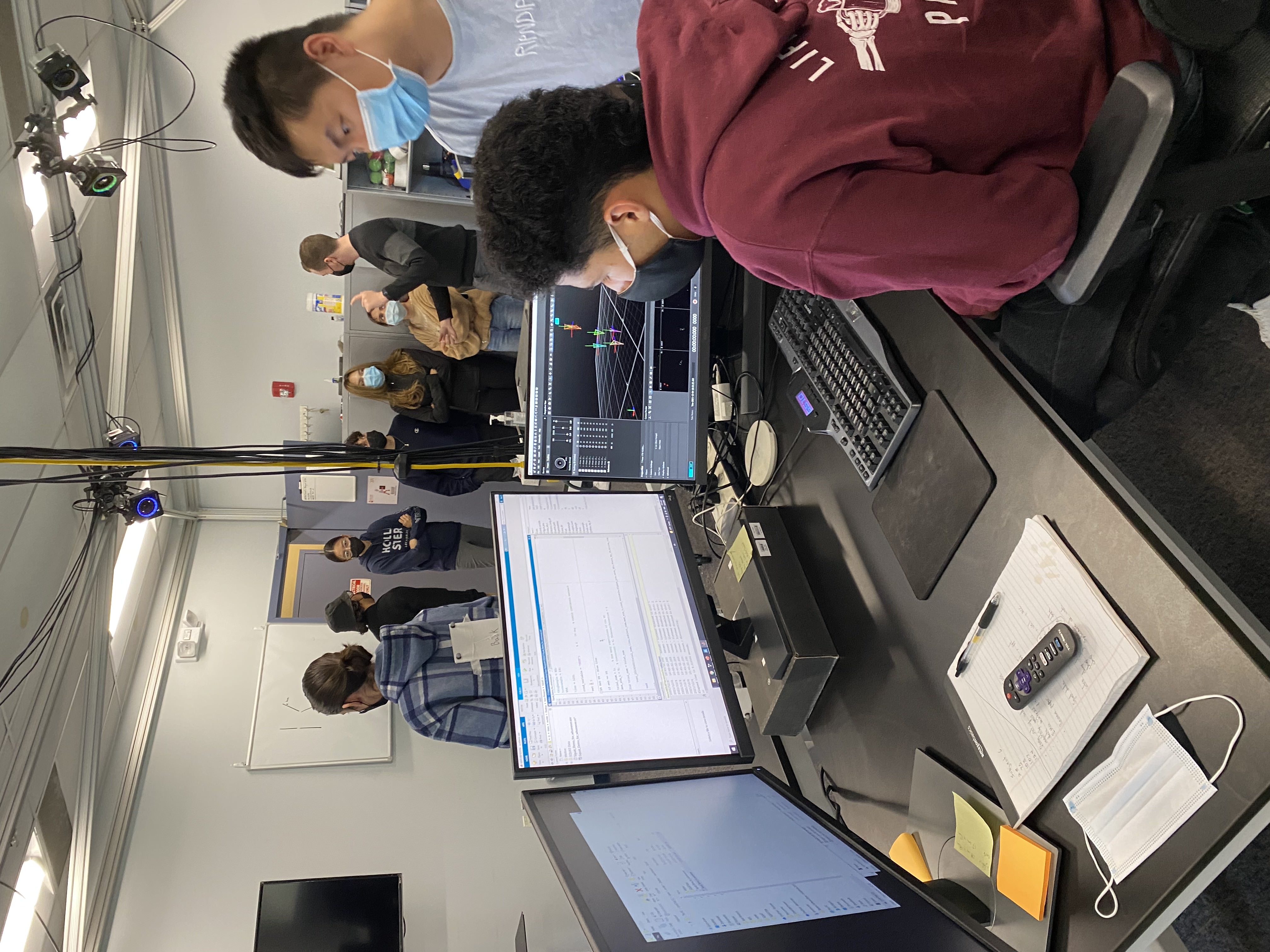
National Biomechanics Day
On October 20th, 2025, we hosted in lab demonstrations for groups of students visiting Stevens Institute of Technology in honor of National Biomechanics Day.


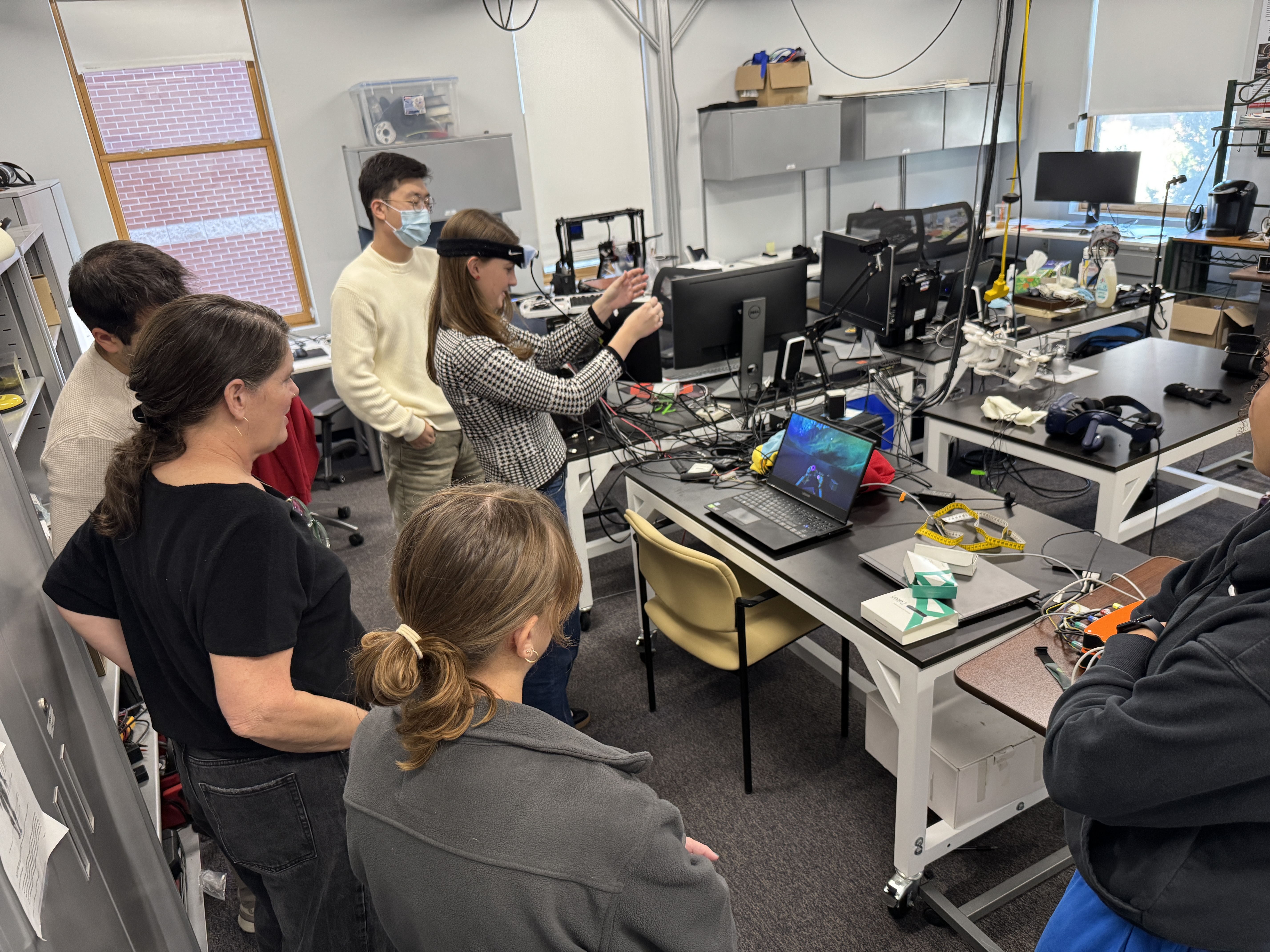
HAR 495 In Class Demo
On October 9th, 2025, we hosted an in lab demonstration and collaboration with Professor Nancy Nowacek in the School of Humanities, Arts, and Social Sciences at Stevens Institute of Technology.
Princeton Bioinnovation Lab
In October of 2025, Dr. Nataraj presented at the Princeton Bioinnovation Lab as part of the annual NJ Academic Drug Discovery Consortium.

CHI Next Gen Symposium 2025
In September of 2025, Ph.D student Sophie Dewil presented her work at the CHI Next Gen Symposium at Stevens Institute of Technology. Sophie Dewil was awarded Best Poster Presentation.

Order of Engineer Induction 2025
On May 20, 2025, Dr. Nataraj was inducted into the Stevens Order of the Engineer Society.

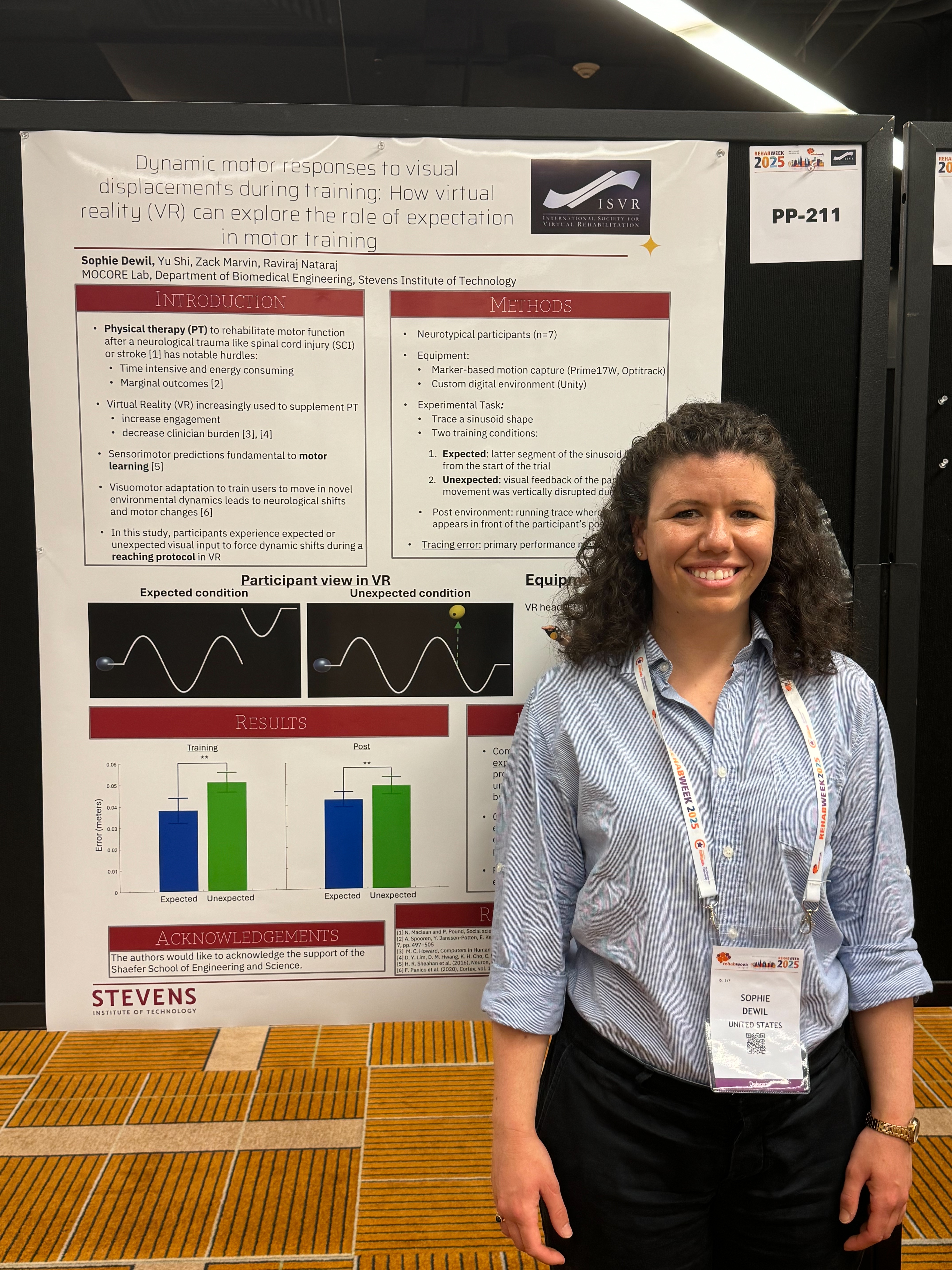
Rehabweek 2025 - Chicago
In May of 2025, Ph.D students Sophie Dewil and Yu Shi attended and presented their work at Rehabweek in Chicago. Yu Shi gave a presentation and Sophie presented her poster during the poster session.

2025 Lab Annual Luncheon
On May 5th, the MOCORE Lab had its annual luncheon with the PI and Ph.D. students.

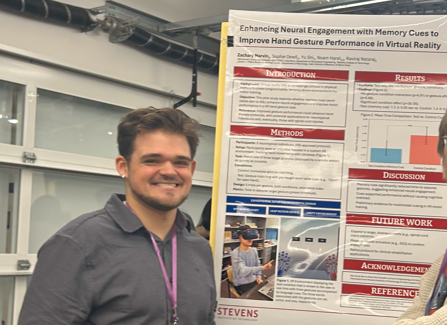
NEBEC Conference 2025
In April 2025, Ph.D student Zachary Marvin gave a presentation at the NEBEC Conference at NYU in Brooklyn and won best poster.
Knicks vs. Miami
Lab attends Knicks game on St. Paddy's Day



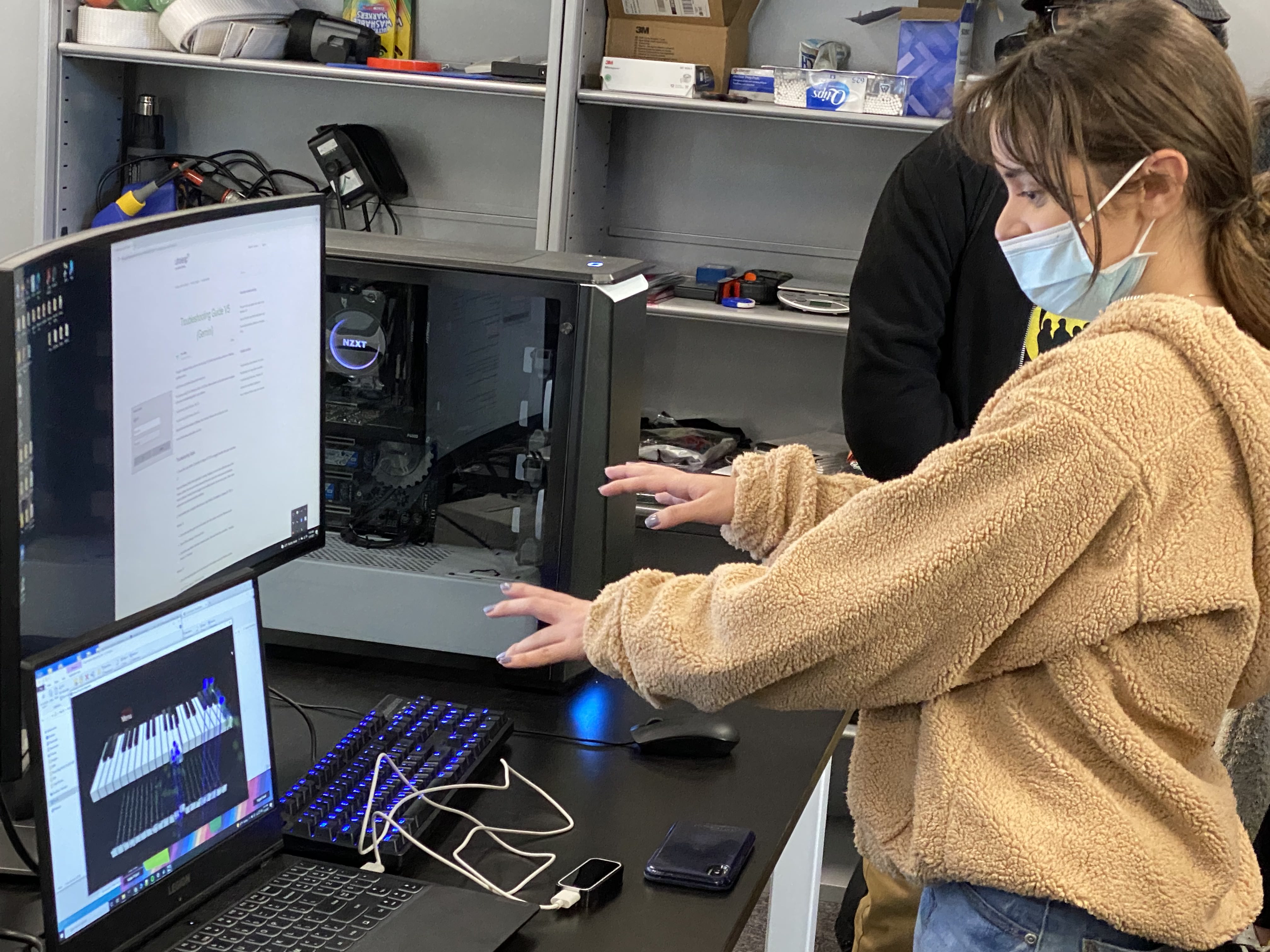
Demonstration with High School Students from our MOCORE VR Education Program
On February 23, 2025, the lab hosted high school students from the MOCORE VR Education Program. Isha Bhatia demonstrated her program for upper-extremity skill rehabilitation

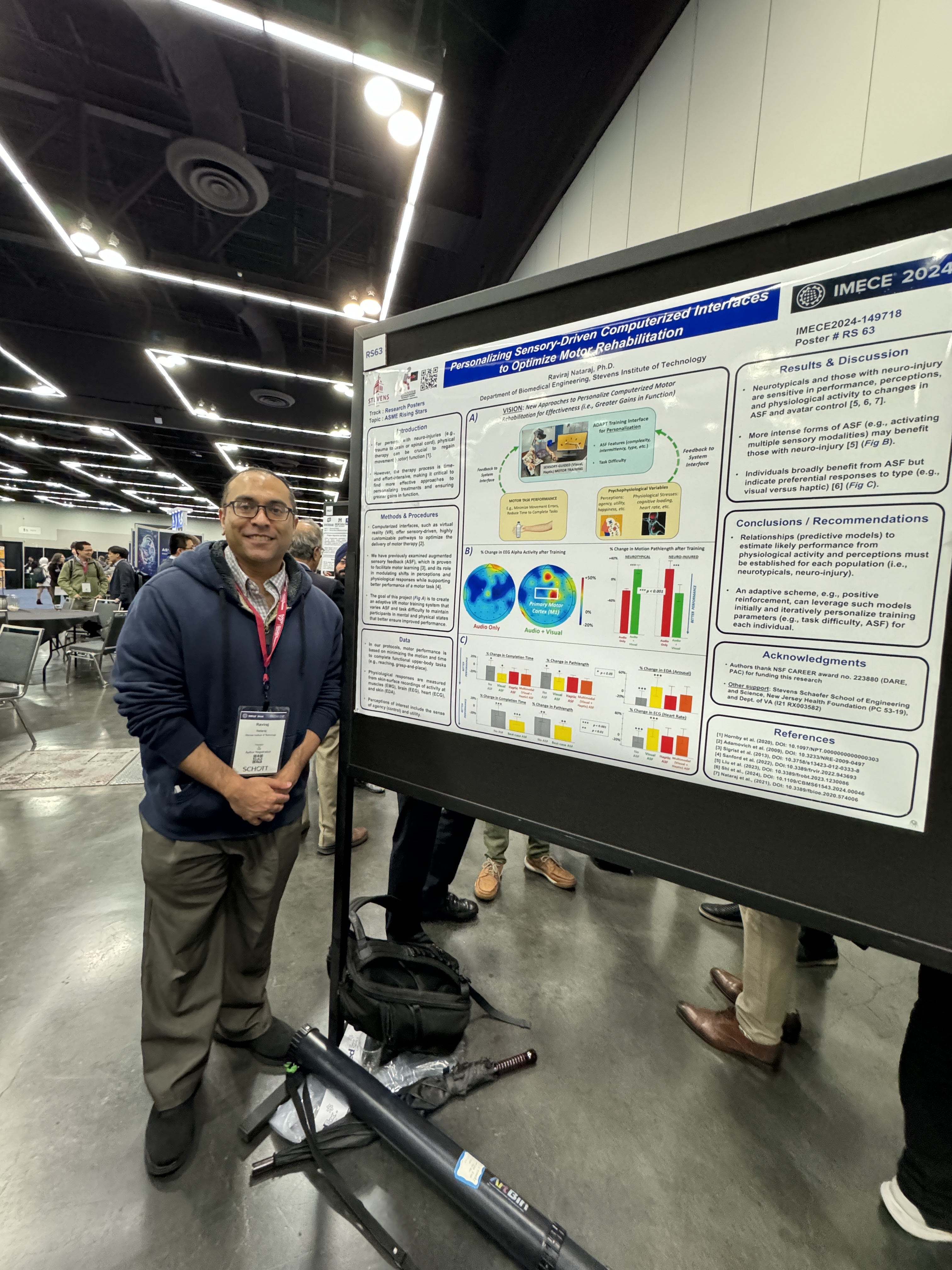
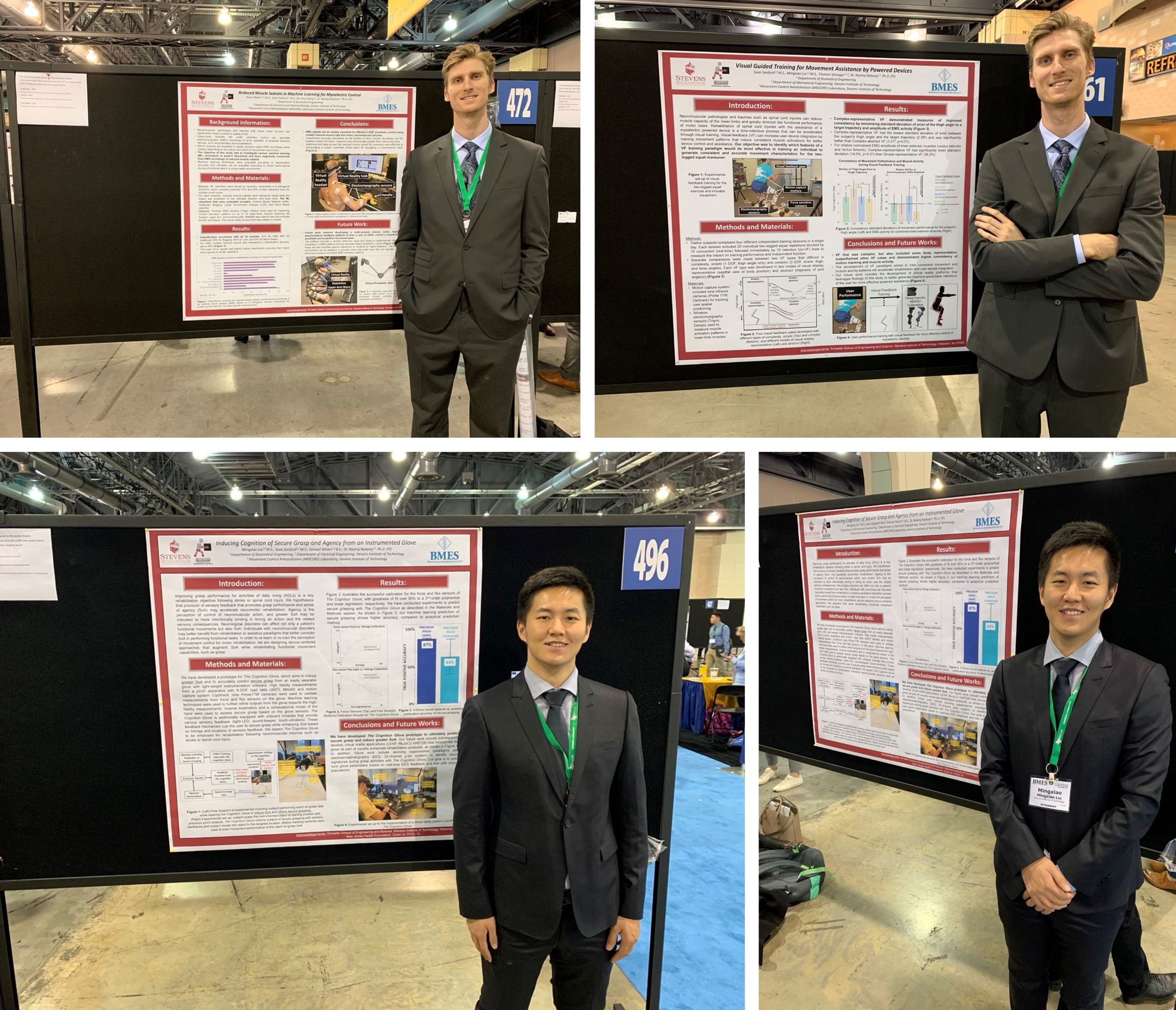
ASME IMECE 2024
In November 2024, Dr. Nataraj was recognized as an ASME Rising Star in Mechanical Engineering and participated in the poster session at the Oregon Convention Center.
iCreate Conference 2024
In August 2024, former Ph.D student Mingxiao Liu and current Ph.D student Sophie Dewil gave a presentation at the iCreate Conference in Shanghai, China



2024 Lab Annual Luncheon
On May 14th, the MOCORE Lab had its annual luncheon with the PI and Ph.D. students.

NIDILRR Presentation
On June 6th, 2024, Dr. Nataraj gave the seminar for the University of Minnesota SCIMS Grand Rounds (sponsored by NIDILRR) YOUTUBE Link: https://www.youtube.com/watch?v=8sCmmCQT4oE&t=89s
2024 ACES Partnership Day
On May 31st, 2024, high school students visited the MOCORE laboratory as part of Stevens-ACES Partnership Day.



Northeast Bioengineering Conference 2024
Stevens Institute of Technology hosted the 2024 Northeast Bioengineering Conference (NEBEC) in April. The MOCORE lab assisted in the planning and execution of the conference and gave multiple presentations on work in the lab. Yu Shi gave a poster presentation entitled "Augmented Sensory Feedback in Rehabilitative Training", and Sophie Dewil gave a podium presentation entitled "Error induction during rehabilitative training to improve motor performance and increase EEG theta band power"



Mingxiao Liu Ph.D. Defense and Graduation
Mingxiao Liu, PhD in Biomedical Engineering | Department of Biomedical Engineering, Summer 2023 Title: Multimodal augmented sensory feedback during motor rehabilitative training and its influence on psychophysiological measures
Abstract: Neurological trauma to the brain or spinal cord can severely impair motor function to perform activities of daily living. Recovering movement capabilities such as reaching and grasping is typically done with rigorous and repetitive physical training, which can challenge patient engagement and willingness to participate. To address these challenges, computerized interfaces such as virtual reality (VR) are increasingly utilized in motor rehabilitation to leverage gamification and immersion to motivate participants. However, the established effectiveness of computerized rehabilitation methods compared to conventional therapies has still not been maximized. My research examines how VR-based training methods with augmented sensory cues and instrumented wearables can potentially accelerate gains in motor function. Specifically, I utilize multimodal (visual and haptic) sensory feedback, proven to enhance motor learning, during the training of rehabilitative motor tasks for upper-extremity function in the VR environment. Additionally, I characterize how multimodal feedback approaches for motor training impact perceptional and physiological measures that indicate user engagement and well-being with training. Findings from this dissertation should inform more optimal design of computerized methods of motor rehabilitation that can be further personalized to individual users at performance and psychophysiological levels.


IEEE 36th International Symposium on Computer-Based Medical Systems (CBMS) 2023
On June 22nd,2023, Sophie Dewil attended the CBMS conference in L'Aquila, Italy. There she gave a podium presentation on research led by Mingxiao Liu entitled "EEG and Motor Effects of Multimodal Feedback to Train Functional Grasp after Traumatic Brain Injury".

2023 Dual Enrollment Program
On June 16th, 2023, High school students from the Dual Enrollment program visited the MOCORE laboratory. They participated in tasks involving marker-based and markerless motion capture system.


2023 9th International Conference on Virtual Reality
On May 14th, 2023, Mingxiao Liu attended the ICVR conference virtually. Mingxiao gave an oral presentation entitled "Multimodal Augmented Feedback for Functional Grasp Training using a Smart Glove and Virtual Reality for Persons with Spinal Cord Injury." His presentation was awared as the Excellence Oral Presentation of the Conference.
Northeast Bioengineering Conference 2023
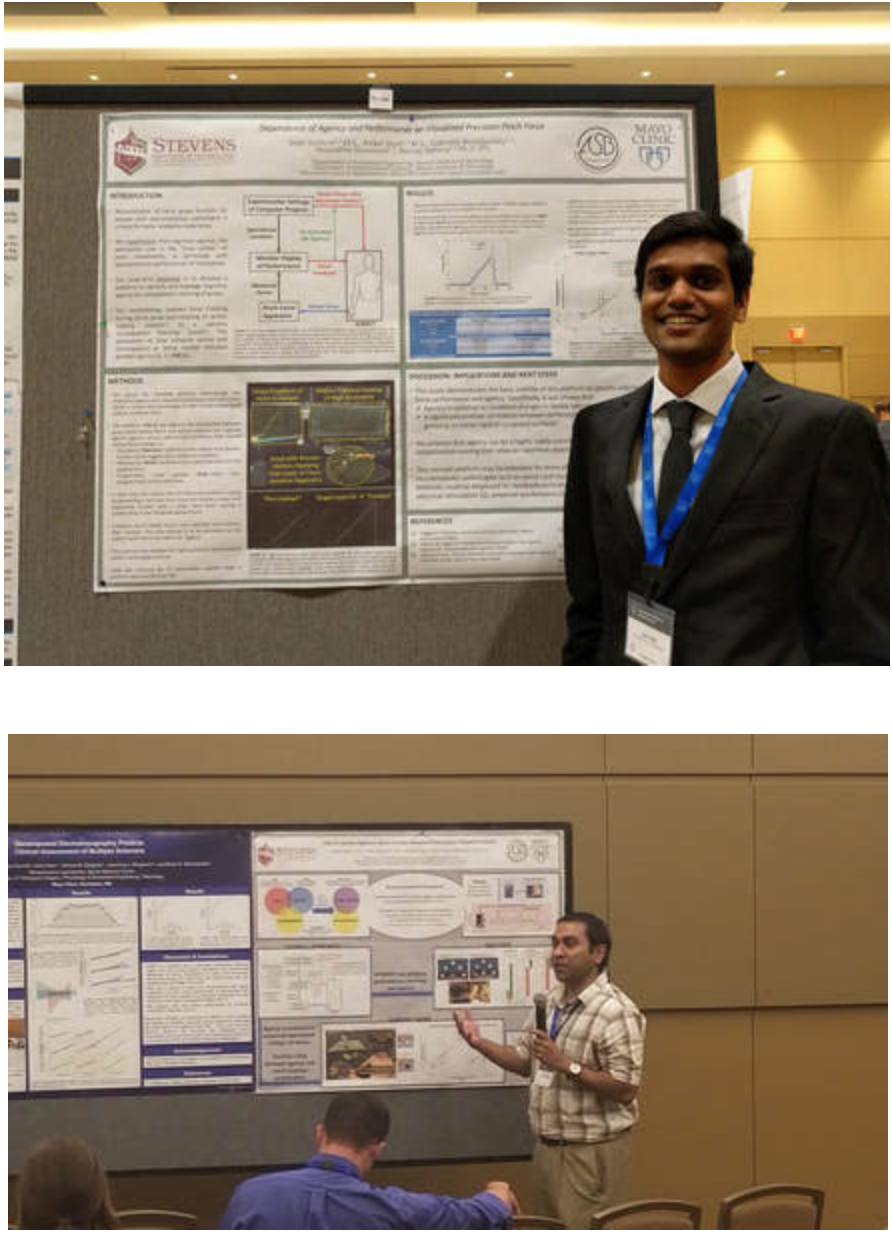
On March 30th, 2023, Mingxiao Liu and Sophie Dewil attended the NEBEC conference at Drexel University. Mingxiao gave a podium presentation entitled "Functional Grasp Training using Mixed-Mode Reality after Spinal Cord Injury," and Sophie presented a poster entitled "Electroencephalography (EEG) Responses with Motor Tasks Guided by Computerized Feedback."


NSF Career Award - 2023
In January, Dr. Nataraj and the MOCORE Lab were awarded an NSF career award from the program of Disability and Rehabilitation Engineering (DARE). More information can be found here
Art Harper Saturday Academy (AHSA) - 2022
High school students from the AHSA visited the MOCORE laboratory on December 3rd, 2022. They participated in tasks involving markerless motion capture and electromyography (EMG), and conducted data anlysis on the EMG data they generated.



Johnson & Johnson Research Showcase 2022
On September 14th of 2022 Mingxiao Liu presented his research on "Training with Agency-Inspired Feedback from a Sensor Glove in Virtual Reality to Improve Grasp Performance".
Center for Neuromechanics (C4N) Conference at Stevens Institute of Technology 2022
On August 10th, 2022 Daniel Yu presented his research on a "Support Vector Machine Classification of Visual Attention from EEG Inputs during Multimodal Sensory Feedback"
Abstract: Support vector machines (SVM) were used to classify visual attention (based on eye-tracking measures) from EEG inputs during variations in augmented sensory feedback (ASF). During a virtual reality (VR) task using myoelectric control, ASF was provided under either unimodal (visual only) or multimodal (visual + haptic) conditions. It was hypothesized that ASF would produce distinct changes in EEG patterns, which was implied with SVMs trained on ASF cases having less generalizability. Ultimately, machine learning classification of attention from EEG patterns may facilitate adaptation of VR-type training environments, capable of ASF, to ensure high attention (e.g., vigilance) during training.Stevens News Story: Multisensory Learning Experiences at National Biomechanics Day at Stevens
Northeast Bioengineering Conference 2022
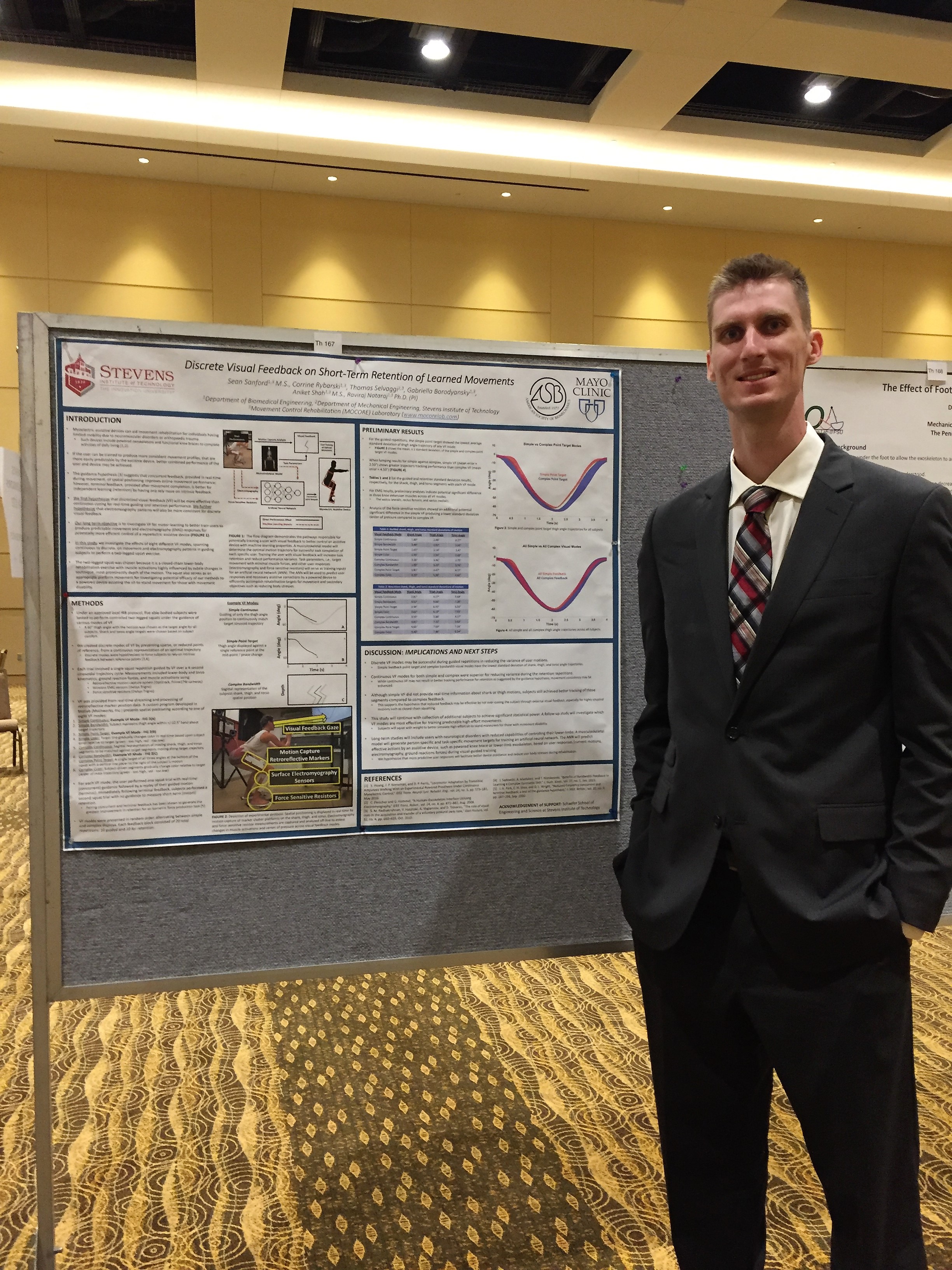
In April of 2022 Mingxiao Liu and Sean Sanford presented their individual work on "Training with Agency-Inspired Feedback from a Sensor Glove in Virtual Reality to Improve Grasp Performance" and "Augmented visual feedback for virtual reality-based rehabilitation utilizing isometric muscle control", respectively.


International Conference on Biomedical Engineering and Systems 2022
In July of 2022 Linda Vataksi presented research conducted by herself and Sean Sanford on an "Instrumented Upper-Body Brace for Computerized Training of Muscle Control".
2022 Stevens Excellence Doctoral Fellowship
Mingxiao Liu received the Stevens Excellence Doctoral Fellowship from the Office of the Provost for the 2022-2023 academic year. This fellowship supports doctoral students who are working on their dissertation research and writing, and have achieved high academic standing.
Hoboken Library STEM panel
In June of 2022 Dr. Raviraj Nataraj participated in a STEM Career Panel through the Hoboken Public Library. He presented his journey to become a biomedical engineer, the research that he currently conducts, and gave advice for anybody wishing to pursue a STEM career.
2022 Harvey N. Davis Distinguished Teaching Assistant Professor Award
Dr. Raviraj Nataraj received the Harvey N. Davis Distinguished Teaching Assistant Professor Award. It is given to a faculty member with exceptional teaching ability who has demonstrated great influence on students inside and outside the classroom


Sean Sanford Ph.D. Defense and Graduation
Sean Sanford, PhD in Biomedical Engineering | BME Outstanding Dissertation Award Department of Biomedical Engineering, Spring 2022 Title: Augmented Sensory Feedback to Accelerate Motor Performance with Computerized Interfaces for Rehabilitation
Abstract: Neurological traumas can impair motor function and compromise the ability to perform activities of daily living. Physical rehabilitation can aid in motor recovery, but these practices are frustrating due to their rigorous and repetitive nature. Emerging rehabilitation technologies utilize computerized interfaces, such as virtual reality to increase participant engagement and better train muscle-level control. These interfaces can readily provide enhanced augmented sensory feedback, especially at visual levels, to accelerate motor outcomes. Still, there remains a lack of understanding in optimizing the deployment of augmented sensory feedback for clinical motor rehabilitation. In this research, I investigated how specific features of augmented visual feedback can improve motor performance during rehabilitation training. The two primary features of interest were complexity and intermittency, which vary the amount and frequency of visual guidance provided, respectively. A key supplementary feature of augmented visual feedback is the level of body representation to leverage visual embodiment, which was also examined. I evaluated unique combinations of these features to improve functional performance of two different motor rehabilitation exercises, representing either a motion- or force-based task. For a two-legged squat exercise (motion-based), augmented visual feedback that was relatively complex with more body-discernible guidance cues produced the best performance during and after training. The dynamic embodiment may have facilitated the ability to effectively synthesize more feedback information during a synergistic, multi-segment movement. Alternatively, training with simple feedback demonstrated a greater potential for motor learning of a task utilizing isometric muscle control (force-based). Complex feedback may have been interpreted as superfluous to this task, given the shifted emphasis to force control without dynamic embodiment. Thus, the additional cues may have hindered both learning and user experience, reflected in reduced performance and significant physical and cognitive stress changes. For training of either experimental task, intermittently providing visual feedback about real-time performance errors (i.e., concurrent bandwidth feedback) suggested a greater potential for motor learning. In conclusion, systematic variation of specific features in augmented feedback can significantly improve motor performance. Thus, optimizing computerized interfaces for motor rehabilitation requires a greater understanding of how sensory feedback affects the user for a given functional task.

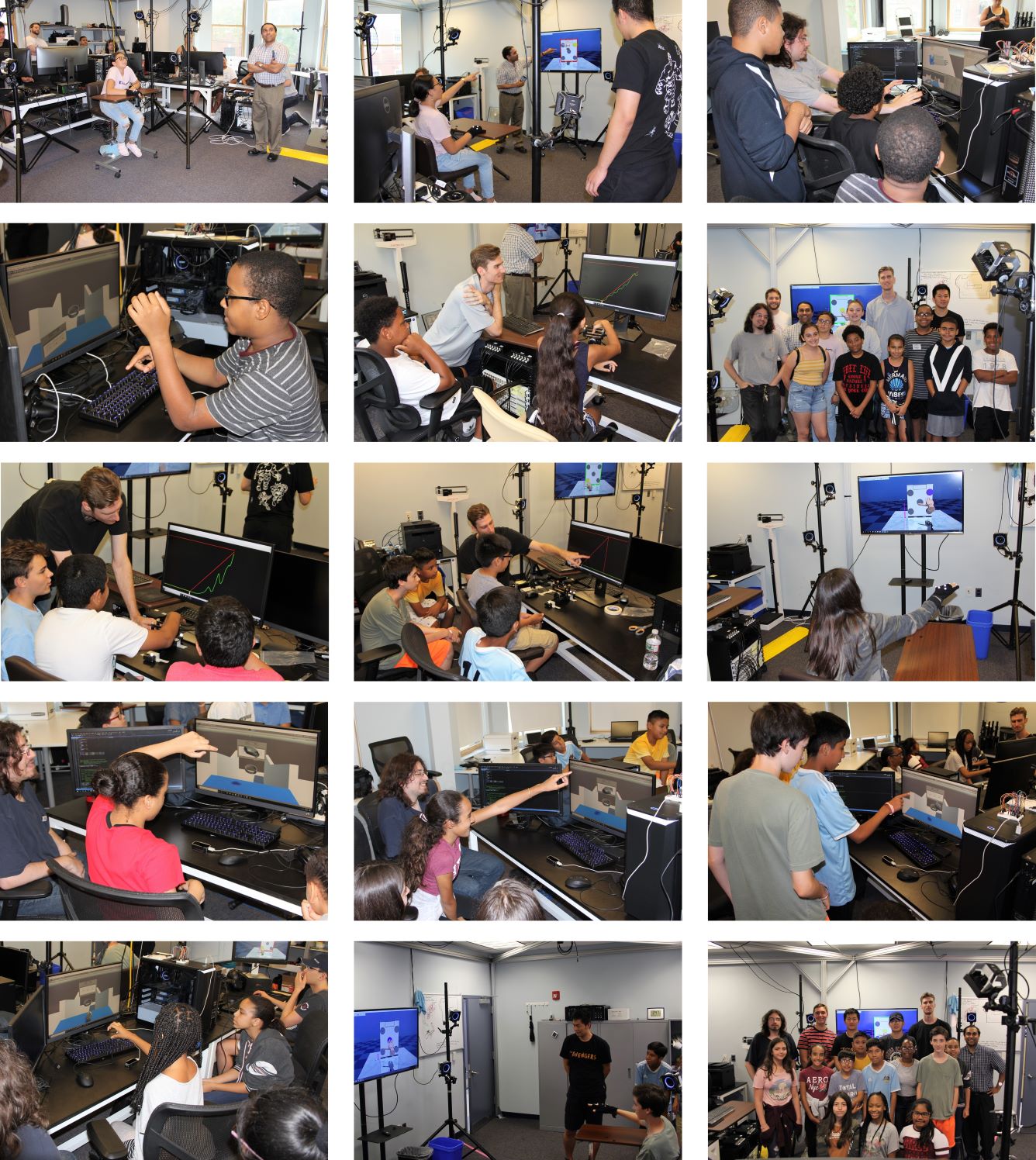
2022 National Biomechanics Day
On May 24th of 2022 our lab as well as others in the Biomedical Engineering Department led a day of events for middle and high school students aimed at increasing education and interest in biomechanics. We provided students with a brief demonstration of our work in motion capture, and discussed its applications in the field of motor and cognitive rehabilitation.



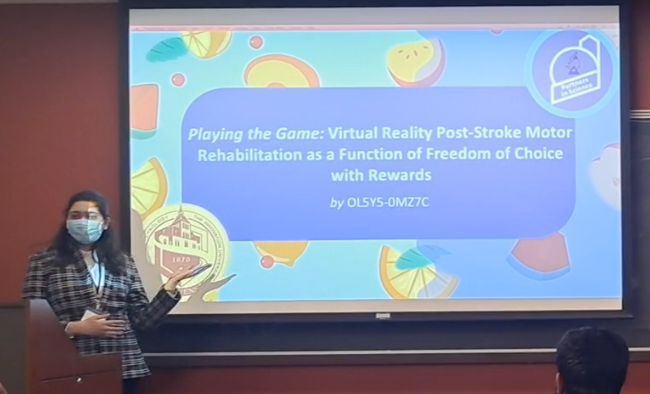
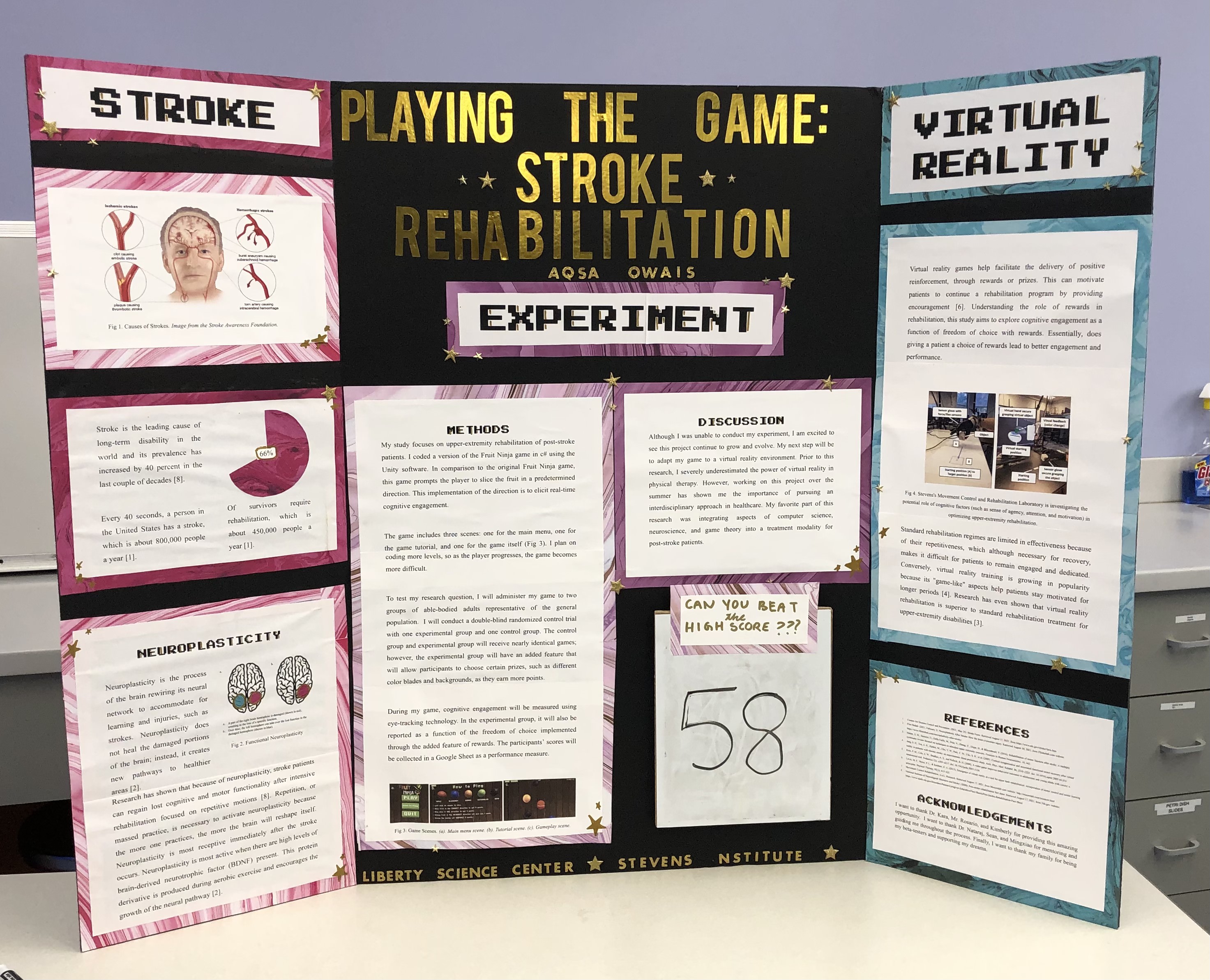
2022 Muslim Interscholastic Tournament (MIST)
Aqsa Owais was awarded third prize at the Muslim Interscholastic Tournament (MIST) for her virtual reality training program designed in collaboration with the MOCORE lab. She presented her work entitled "Playing the Game: Virtual Reality Post-Stroke Motor Rehabilitation as a Function of Freedom of Choice with Rewards"
2022 Regeneron Westchester (NY) Science and Engineering Fair (WESEF)
Kwabena Boateng was awarded first prize at the Westchester Science & Engineering Fair (WESEF) for his virtual reality training program designed in collaboration with the MOCORE lab to improve sense of agency and movement control .


Lab Visit by the Art Harper Saturday Academy
The Art Harper Saturday Academy is a pre-college program that takes place on Stevens Campus and provides learning opportunities for applying classroom knowledge to find solutions to real-world problems. The program reaches out to high school students from under-resourced communities who are interested in pursing college majors in STEM and related fields. Students from the Academy visited the MOCORE Laboratory and received an in-depth lecture on Biomedical Engineering from Dr. Nataraj followed by hands-on experiences with virtual reality and motion capture led by Mingxiao Liu and Sophie Dewil.

Project Mjolnir
In 2021 Dr. Nataraj supervised a senior project team ('Project Mjolnir') from the ECE department that won the David and GG Farber Societal Impact Award at Stevens. This award was established to create awareness among students of the impact their innovation can have on society at large and the power it has to improve lives all over the world. The project involved full-body actuation by a powered exoskeleton, details found here: Project Mjolnir
2020 Stevens Excellence Doctoral Fellowship
Sean Sanford received the Stevens Excellence Doctoral Fellowship from the Office of the Provost for the 2020-2021 academic year. This fellowship supports doctoral students who are working on their dissertation research and writing, and have achieved high academic standing.
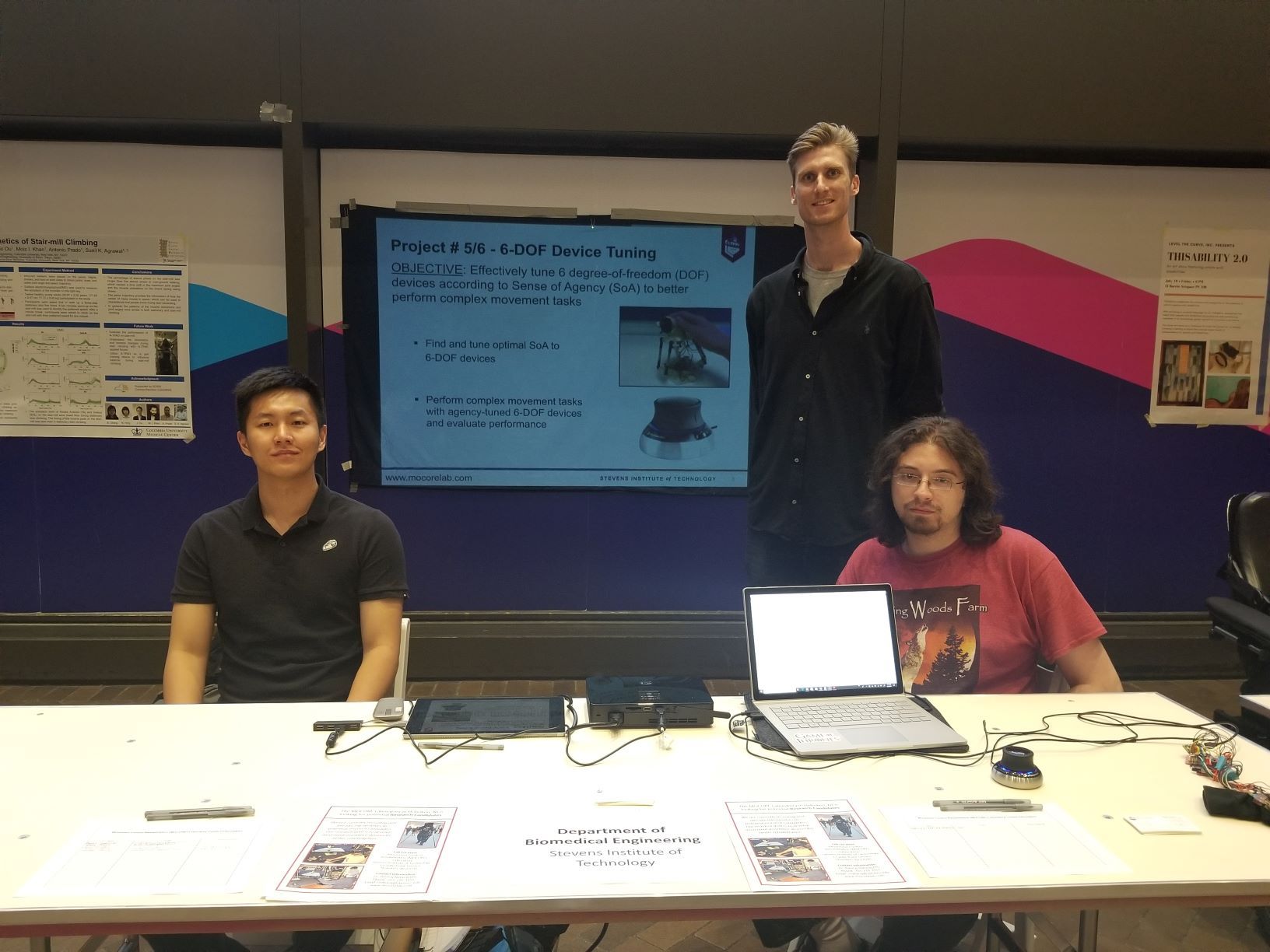
Cognitive-based Tuning of 6-DOF Devices for SCI Rehabilitation
Samuel Wilder, MS in Biomedical Engineering | BME High Academic Achievement Award Department of Biomedical Engineering, Summer 2020 Title: Sense of Agency and Performance in Using 6-DOF Devices
Abstract: In this preliminary study (n = 4), we characterized sense of agency and performance in the use of six degrees of freedom (6-DOF) devices. We observed how agency, or perception of control, and performance changes with devices whose manual interface is either fixed (SpaceMouse) or compliant (Stewart-Gough Platform). We investigated the covariations in agency versus performance of a simple circle tracing task across multiple operation-sensitivity levels for each device. The presented approach in this study may be relevant to the design of better motor rehabilitation platforms utilized in physical therapy after neurotraumas such as spinal cord injury. Computerized interfaces are increasingly used in rehabilitation since they are cognitively engaging and encourage skillful hand function. Rehabilitation methods that adapt the device interface to promote greater user agency and performance may facilitate better motor outcomes. In this study, subjects performed a circle tracking task while agency was implicitly assessed using time-interval estimation based on intentional binding. Our findings are currently inconclusive with completion of only 4 subject data collections. Our preliminary results indicate that performance dependence on agency is greater with the fixed interface. This finding suggests that motion at the manual interface introduces uncertainties to the user that degrade agency-based performance. Future work should include additional data collections, evaluation of neurophysiological (electromyography, electroencephalography) signals as signatures for agency-based performance, and identification of device design features that are generalizable to any human-machine interface (HMI).
Ask a Stevens Professor
In March of 2022 Dr. Raviraj Nataraj participated in a webinar series entitled "Ask a Stevens Prof" where he discussed the physical and neurological consequences of a spinal cord injury, as well as his research in rehabilitation and assistive devices for people with spinal cord injury. Check out the recording here.
2020 Johnson and Johnson Engineering Showcase
Sean Sanford and Mingxiao Liu competed in the 2020 Johnson and Johnson Engineering Showcase held in New Brunswick, NJ. Sean Sanford finished 1st place in the University Poster competition.

2019 Biomedical Engineering Society Annual Meeting
Sean Sanford and Mingxiao Liu attended the 2019 Biomedical Engineering Society Annual Meeting held in Philadelphia, PA. Mingxiao Liu presented his work on Cognitive Agency while Sean Sanford presented his own research and the research of fellow MOCORE member, Kevin Walsh.
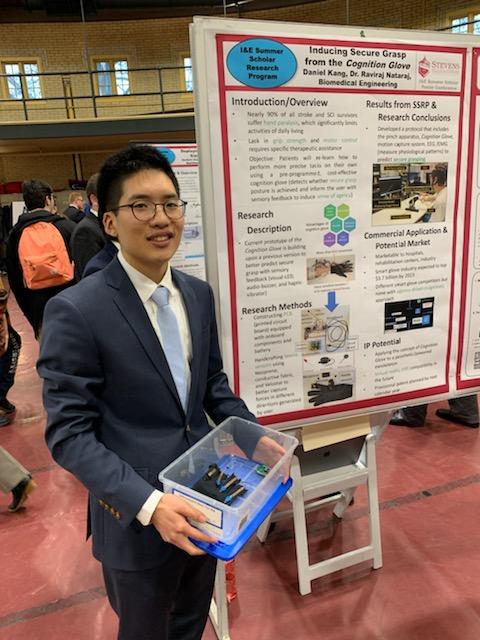
2019 Innovation and Entrepreneurship Summer Scholars
Brian Collins and Daniel Kang represented the MOCORE laboratory in the 2019 Office of Innovation and Entrepreneurship Summer Scholarship program. Brian Collins developed work for a vibrotactile stimulation device geared towards virtual reality rehabilitation research. Daniel Kang worked to further develop a prototype glove for the Cognitive Agency research project.

Hoboken Summer School Community Outreach
Hoboken Summer school students of all ages toured various laboratories at Stevens. The tour group visited the MOCORE laboratory for a presentation given by Sean Sanford and Mingxiao Liu on neuromuscular pathologies and assistive devices. Students had the opportunity to demonstrate a new virtual reality task developed by Sam Wilder.

Hoboken Middle School Community Outreach
Local Hoboken Middle School students had the opportunity to visit the MOCORE laboratory and take part in interactive workshops geared towards our research in user-device integration.
Mount Sinai Spinal Cord Injury Community Fair
The MOCORE laboratory presented a booth at the 2nd Annual Spinal Cord Injury Research Community Fair located at Mount Sinai in Manhattan, NY.

Adaptive Machine Learning for Myoelectric Control
Kevin Walsh, MS in Bioengineering | Outstanding Dissertation Award Department of Biomedical Engineering, Spring 2019 Title: Simulated Nervous System Lesions in Machine Learning for Myoelectric Control
Abstract: Neural disorders or traumas can significantly impact an individual’s quality of life, due to impaired motor function. Electromyography (EMG) signals arising from muscle activation have become popular for providing inputs to advanced prosthetics that help these patients. Machine learning (ML) methods such as artificial neural networks (ANN) and adaptive boosting can recognize patterns in EMG signals and classify them into useful command inputs. Myoelectric systems are applied to advanced prostheses and other rehabilitation devices as a means for natural user control. This thesis demonstrates 91% accuracy in classifying movements by orthogonal movement direction and force exerted during the movement using ANN and 96% accuracy using adaptive boosting ML classifiers. However, the muscles that are available for EMG recordings may be limited or compromised depending on the specific nature of each movement disability. The objective of this study was to investigate what classification accuracy may be achieved in the prediction of directional and force magnitude controls from the muscle recordings presumed available following various neural lesions. Simulated nervous system lesions lowered classification accuracy to between 35% for a data set with a simulated C5 spinal cord lesion that receives input only from the trapezius and 88% for a data set with a simulated ulnar nerve lesion. All classification accuracies were greater than chance, showing that these simulated deficiencies still may allow for some measure of device control. These ML methods will be further investigated for ‘functional’ control of a prosthetic device or virtual reality (VR) arm in real time. Our research group is currently developing capabilities for real-time streaming of EMG data into MATLAB and VR for this purpose.

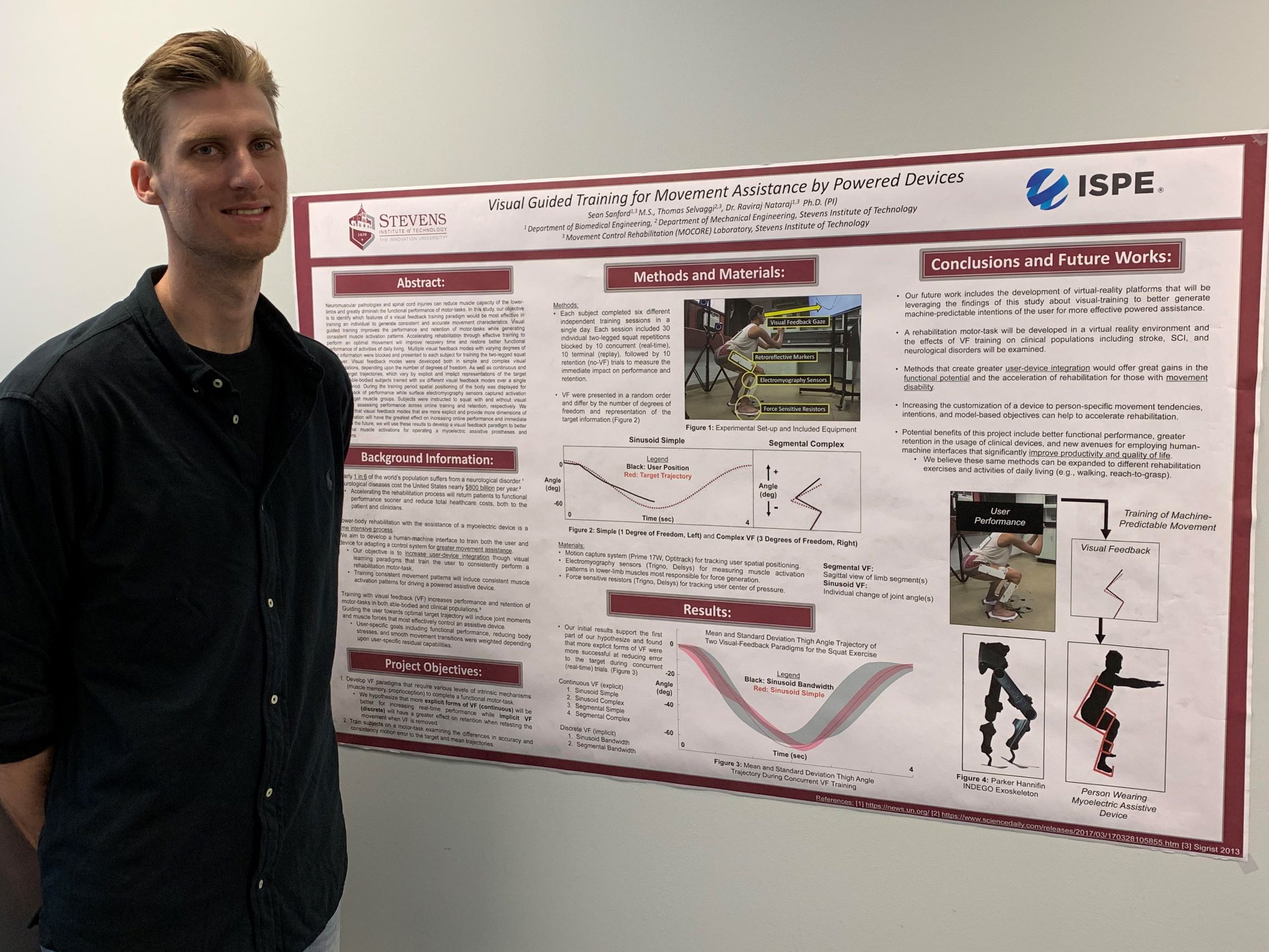
ISPE Regional Conference
Sean Sanford was awarded 1st place in the University poster competition at the International Society of Pharmaceutical Engineering conference and was the regional representative for the 2019 ISPE Annual Meeting and Expo

Role of Agency in Hand Reach and Grasp Rehabilitation
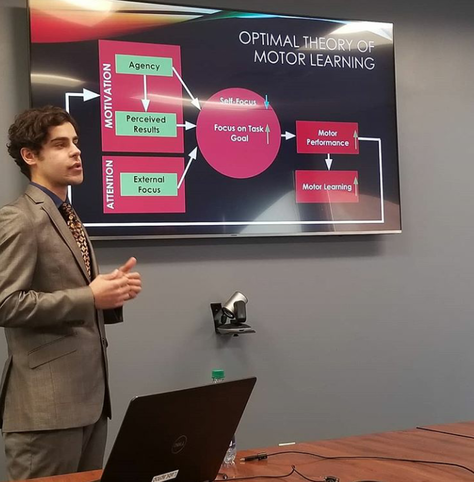
David Hollinger, MEng Department of Biomedical Engineering, Fall 2018 Title: Accelerating Neuromotor Learning with Reward Feedback
Abstract: Approximately 85% of stroke survivors suffer hemiparesis, resulting in loss of motor function on the contralateral side of the damaged brain (Nakayama et al., 1994). 46-95% of hemiparesis survivors still experience problems 6 months post stroke (Kong et al., 2011). Interventions focusing on high-intensity and repetitive task-specific practice showed the most promise for improving motor recovery (Ávila et al., 2012). The rate of motor learning depends on task type and feedback display. Feedback following ‘good’ trials has shown to enhance motor learning and retention during a sequential timing task (Chiviacowsky & Wulf, 2002). Previous studies using virtual reality (VR) gaming have leveraged desired rehabilitation movement outcomes. The element of gamification heightens user interaction during repetitive rehabilitation movement tasks (Merians et al., 2002; Jack et al., 2001; Deutsch et al., 2001). Patients in control of their movements gain greater motor learning benefits than those without control. Therefore, it is imperative to incorporate methods which maximize user control, or agency, to enhance motor learning. Our research study will test how reward and punishment impacts motor performance (e.g. path length, end effector accuracy) and agency during an upper arm reach-to-touch VR task. Results indicate that participants who receive reward outperformed participants receiving punishment. Reward enhanced cognitive agency and contact accuracy indicating that knowledge of positive results led to improved self-efficacy and motor performance. The results agree with OPTIMAL theory of motor learning where positive motivation and external focus of attention facilitate automaticity of movement control and overall motor learning (Lewthwaite & Wulf, 2016).
Brain-Computer Interface Seminar
Co-sponsored by renowned Christoph Guger, CEO, g.tec, Austria


2018 Innovation and Entrepreneurship Summer Scholar Award
Office of Innovation and Entrepreneurship Scholar Award presented to Corrine Rybarski for 1st Place in the Elevator Pitch Competition


2018 American Society of Biomechanics Annual Meeting
42nd Annual Meeting of the American Society of Biomechanics, August 8th-11th 2018
Stevens Article
Stevens Team Uses Virtual Reality to Help Control Prosthetic Limbs and Restore Post-Amputation Sense of Motion Click to view article
Bioengineering Conference
44th Annual Northeast Bioengineering Conference, March 28th-30th 2018